



本期小编将继续介绍《海上自主船舶规则》第二部分内容:MASS和MASS功能的通用原则。该部分共包括检验发证、审批流程、风险评估、操作环境、系统设计、软件原则、安全营运管理、增强海上安保的特殊措施、警报管理、配员培训和值班、维护保养共11个章节。
一、关于检验发证
MASS规则明确了MASS和ROC的发证要求。其中,MASS应当在SOLAS证书基础上额外取得MASS安全证书,ROC应当按照“一船一证”的原则取得ROC安全证书。
MASS和ROC安全证书都应当配备记录簿,说明船舶的自主或远程操作功能、操作限制、人机职责分配、法规差距、检验要求等,为港口国监督检查提供必要的信息。
MASS证书检验要求与SOLAS证书基本一致,但在附加检验中增加了关于自主或远程操作功能相关的设备或系统进行任何重大修理、更新或改装的情形。
规则还创造性提出MASS和ROC临时安全证书的概念,主管机关可在MASS系统完成测试验证以后颁发临时证书,允许MASS和ROC在营运过程中开展测试验证,但必须明确测试水域和期限。
此外,MASS和ROC应当取得ISPS证书和最低配员证书,如果ROC同时负责多条船舶的控制,则ROC应当制定关于值班和其他任务安排的船长计划(MRMP)。
二、关于审批流程
MASS规则遵循《IMO文书所规定的替代和等效审批导则》(MSC.1/Circ.1455)原则,以风险评估为核心、以传统船舶的安全水平为衡准,建立自主船舶审批流程,包括初步设计制定、初步设计审批、测试验证、最终审批、运营共5个步骤,并对每个步骤应当制定并提交主管机关的信息和文件进行了明确。
三、关于操作环境
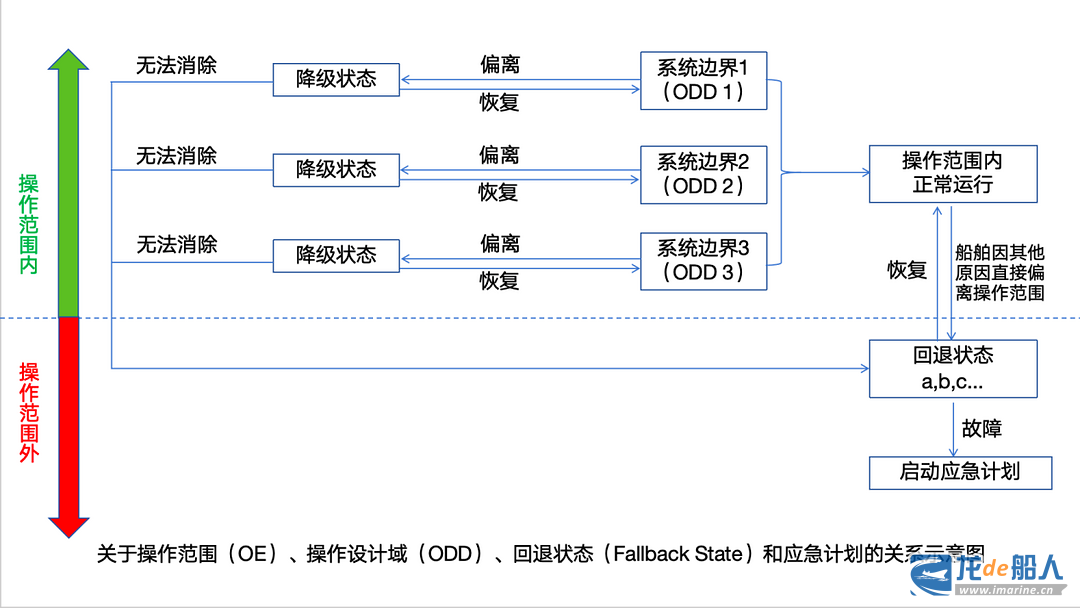
该章节是MASS规则的核心逻辑中枢,也是自主船舶区别于传统船舶最具标志性的制度设计。规则参考自主驾驶车辆的规制要求,引入了操作概念文件(ConOps)、操作设计域(ODD)、操作范围(OE)、降级状态(Degraded State)、回退状态(Fallback State)等概念。其本质是认识到自主或远程操作功能的局限性,因此要求船舶在设计之初就必须清晰的界定系统和船舶的操作边界,说明不同航段下船舶的操作模式以及人机职责分工情况。在超出操作边界时,要求船舶自动进入提前预设的回退状态,如果情况进一步恶化,则应当启动应急计划,确保自主或远程操作功能的安全。
同时,规则强调人为监督控制的重要性,要求船舶无论处于何种自主化水平,都应当配备自然人船长对船舶安全负责。为此,系统应当提供相关渠道,确保人员能够理解系统产出的内容,能够监督系统并对系统作出的决策进行验证,必要时人员能够介入或对系统进行越控。
四、关于系统和软件
系统和软件是影响自主船舶安全运行的关键因素,因此MASS规则对与自主或远程操作功能相关的系统设计和软件原则分别提出高层级的安全要求。其中,系统设计应当遵循以安全为中心、以人为中心、鲁棒性、可靠性、适应性、冗余和容错、可扩展性、保安和网络安全、数据管理和质量、数据记录、互操作性、测试和验证、透明度等13方面要求。软件原则则包括比例性、可靠性、安全和保安、透明度和可解释性、可追责性、鲁棒性、可控性、非故意歧视等8方面要求。
值得注意的是,规则要求所有MASS(500总吨以上)都应当符合SOLAS 第V/20条的要求配备VDR。
五、关于安全营运管理
规则对MASS安全营运管理体系的构建提出补充性要求。
1.日常运营管理要求
重点考虑自主或远程操作功能的风险管控、制度有效性核验、人机界面、远程操作中心职责与性能;同时覆盖系统交互、软硬件复杂度、船岸通信、网络风险、故障备用方案等内容。
2.人员保障要求
体系需明确人员配置与培训需求,保障作业人员安全与权益。需落实风险管控、制度核验、人机界面管理,厘清作业权责,确保船长最高指挥权,并关注操作人员的心理与工作压力。
3.应急管理要求
重点包括监控系统运行状态、明确应急处置能力边界、保障船岸最低通信连通、规范岸基求助流程、防控应急状态下的网络风险、应急待命的安排和设备、应急计划的灵活调整等。
值得注意的是,在本章节的最后还包括一段关于ROC安全营运管理的替代措施,考虑到未来可能存在专门负责ROC营运的管理公司(独立于船舶的营运管理公司),允许该类公司在满足主管机关要求的前提下,针对ROC营运建立单独的安全管理体系,作为MASS安全管理体系的补充。同时,规则也明确在该替代措施下应当仿照ISM发证体系,对MASS和ROC分别进行发证,并确保两者之间的关联性。由于该种替代措施操作较为复杂,且当前业界实践经验较少,为此规则并未对独立的ROC安全管理体系的内容边界、构建方式和发证要求等进行详细规定。
六、关于配员、培训和值班
随着MASS规则制定的推进,国际社会对于自主船舶的认识也在不断加深,在客观承认技术局限性的同时,关于人员在自主和远程操作中的职责和作用的讨论也贯穿始终。为此,在MASS规则定稿前,MSC单独召开了一届会间工作组会议,专题讨论人的因素相关内容,并最终完成“配员、培训和值班”这一章节草案。
该章节首先从原则上明确,主管机关可以将ROC视为船舶驾驶台关联处所或机舱的一部分,也可以将STCW公约和规则的培训和值班标准适用于远程操作员,作为解决STCW公约无法直接适用于岸基人员的临时方案,也是填补远程操作员培训和值班标准空白的务实举措。此外,MSC同意采用“三步走”的路径,逐步建立MASS船员和远程操作员的培训、发证和值班标准,即当前优先在非强制性MASS规则中制定高层级的培训条款;其次作为临时措施,在非强制性MASS规则完成后制定相关导则;最后作为最终措施,在合适的IMO文书中正式确立培训、发证和值班标准。
该章节主要包括目标,安全配员,值班,培训、熟悉和适任,其他事项共5个部分。
在安全配员方面,规则并未对MASS能否减员或如何减员进行规定,而是对确立MASS和ROC最低安全配员提供原则性指导,包括应当满足《最低安全配员原则》所确立的目标,明确船上船员和/或远程操作员的职责边界和权限划分,不应给远程操作员分配无法在ROC履行的任务和职责等。
在值班原则方面,允许远程操作员在ROC进行值班,值班职责可由船员和远程操作员共同承担,但必须在所有值班人员之间建立明确的权限和职责界限。
在培训、熟悉和适任标准方面,规则要求MASS船员,在根据STCW公约和规则获取相应资质的基础上,应当接受关于船上使用新技术和系统的额外培训,并进行相应评估。远程操作员,至少应当具备不低于STCW公约和规则所规定的资质,同时应当接受远程操作方面的额外培训并进行适当评估。
来源:浙江海事局





