作者:上海船舶运输科学研究所有限公司 操纵性研究小组
船舶操纵性是船舶设计和运营中的关键性能指标,直接影响航行安全、效率和环保性能。目前,船舶操纵性要求仍采用国际海事组织(IMO)海上安全委员会(MSC)2002年颁布的MSC 137(76)号决议,20多年来,随着全球航运业的快速发展,船舶大型化、经济化和智能化趋势日益明显。船型设计以及推进系统性能已经有了显著的发展,原先操纵性规范是否需要修订引起了船东、船厂、设计方、设备商及科研机构等单位的广泛关注。
目前,国际海事组织(IMO)的船舶设计与建造分委员会(SDC)已经启动《1974年国际海上人命安全公约》(SOLAS)中有关传统和非传统船舶推进和转向系统的操纵性法规的修订工作,并由日本、挪威和欧盟牵头,在IMO-SDC 11/WP7 Agenda Item 8专家组报告附则4中,提出了船舶操纵性国际标准(ISSM)修订稿的初稿,计划2028年之前收集相关实船资料和成员国的意见,完成SOLAS修正案和强制性操纵性标准的成套文件,提交至MSC 114审议;2029年,MSC 116通过SOLAS修正案和强制性操纵性标准;计划于2032年1月1日正式执行。
IMO-SDC 11/WP7修订稿由挪威船级社(DNV)依据欧盟课题研究成果提出,对2002年IMO发布的“船舶操纵性标准”(MSC 137(76)号决议)进行了较大幅度的修改,主要包括以下5个方面:①扩大了标准的适用范围,不仅适用于采用传统推进和转向系统的船舶,也适用于采用其他推进和转向系统(包括全回转、喷水推进、直翼桨、双舵等)的船舶;②改变了标准操纵运动时转向系统的转向角的表述,以涵盖非传统推进和转向系统船舶,回转运动试验采用“申报的转向限制角(Declared Steering Angle Limit)”(简称限制角),10°/10°Z形试验的转向角为限制角的2/7,20°/20°Z形试验的转向角为限制角的4/7,正常状态的相关操纵性要求不变;③增加了航向保持试验及最大航向偏离不大于2°的要求;④针对回转能力评估,增加了单桨船和多桨船两类故障状态的定义及其操纵性要求;⑤针对紧急停船能力评估,增加了多桨船故障状态的定义及其操纵性要求。
项目组对上述增加的内容进行了深入的研究,组织海事局、船级社、航运公司、高校、研究院所等相关单位的专家进行研讨,咨询了多位具有丰富航海经验的船长,采集了若干实船的测试结果,补充了相关模型操纵性试验。本文基于模型试验、实船测试数据、专题研讨和专家经验,对IMO SDC 11/WP.7附则4的修订稿提出5点修改建议。
一、调整“其他推进/转向系统”的名称及其涵盖范围
在修订稿第1.2节中,标准适用范围增加了“其他推进/转向系统”,如全向推进器、喷水推进器、摆线推进器和双舵系统,并沿用与传统推进和转向系统相同的试验方法和衡准。修订稿第3.3节规定,该标准不适用于高速船,而喷水推进器主要用于高速船,因此,建议不要将喷水推进器列入该标准。另外,双舵系统是传统推进和转向系统的一种,建议从其他推进/转向系统移出,归入传统推进和转向系统,这样,文本中的其他推进/转向系统名称可以改为非传统推进/转向系统。
二、对采用非传统推进和转向系统的船舶的操纵性试验方法和衡准作进一步验证
与传统推进和转向系统相比,非传统推进/转向系统在操纵力(控制船舶转向的横向力)的产生方式和量值上存在很大差别,其操纵力由推进器直接产生,而不是由螺旋桨后的舵间接产生,在同样的推进器推力和转向系统转角的情况下,非传统推进/转向系统(全向推进器和摆线推进器)的操纵力较传统桨舵系统明显增加。SIMMAN2008会议给出的波兰船舶技术中心(CTO)在露天水池进行的35°舵角模型回转试验结果显示:韩国超大型原油运输船(KVLCC)1号标准模型(KVLCC1)的舵横向力为螺旋桨推力的34.4%~36.2%;2号标准模型(KVLCC2)的舵横向力为螺旋桨推力的24.2%~33.5%。而对于35°转角的全向推进器或摆线推进器,该横向力约为推进器推力的57.4%(sin 35°×100%=57.4%)。可见,其产生的横向力约为传统桨舵系统的1.6~2.4倍。此外,全向推进器和摆线推进器可以360°旋转,而舵的转动角度一般限定在±35°。鉴于非传统推进/转向系统的操纵力与传统桨舵系统存在很大差别,安装这类系统的船舶的操纵性也会有明显差异,采用与传统桨舵系统相同的操纵性试验方法和衡准的合理性和可行性需要进一步验证。
三、取消艏向保持试验
修订稿第4.2.12条要求进行30 min艏向保持试验,第5.3.5条规定艏向保持试验中正常和故障状态下艏向偏差均不得超过2°。考虑实船直线航行时的航速测试和Z形操纵试验的结果已经基本反映了船舶的航向保持能力,没有必要额外进行艏向保持试验。另外,由于风浪流环境、自动控制参数、故障模式等对艏向影响很大,艏向保持试验难以有效实施,建议取消。
四、根据不同船型及其故障状态分别确定回转试验的进距和战术直径上限
标准修订稿第5.3.1.2条提出故障状态回转试验的进距和战术直径分别不大于5.6L和6.25L,即均较正常状态增加了25%。标准修订稿设定的故障状态主要有两类:对于单转向系统船舶的故障状态是其中一个动力单元不运行,即转舵角速度减半;对于双转向系统船舶的故障状态是其中一个转向系统不运行。
项目组进行了3型单桨单舵模型和1型双桨双舵模型的结构吃水正常状态和故障状态的35°舵角回转运动对比试验,模型航速对应于实船结构吃水的设计航速,正常状态的模型转舵角速度对应于实船2.32°/s的转舵角速度。模型回转运动试验分析结果分别如表1和表2所示,其中,Dt为战术直径,LPP为垂线间长,Ad为进距,LNG为液化天然气。
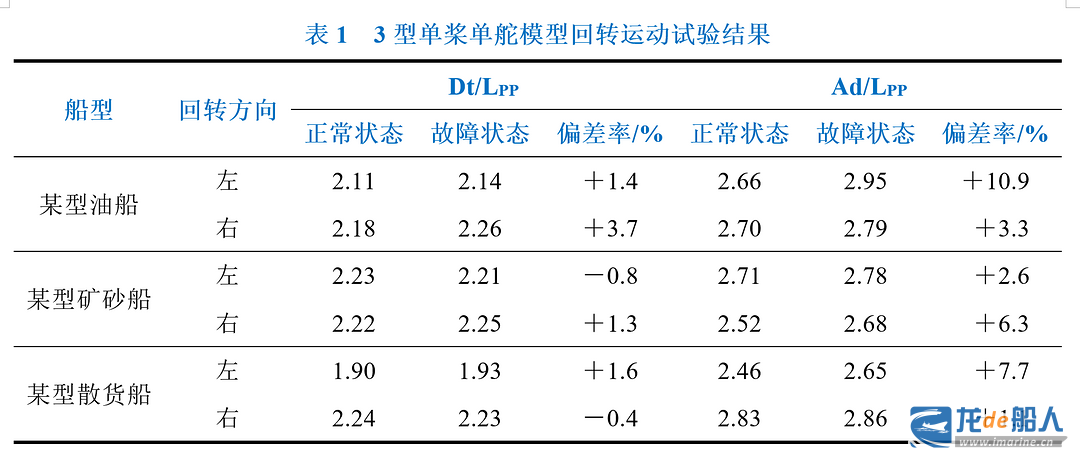
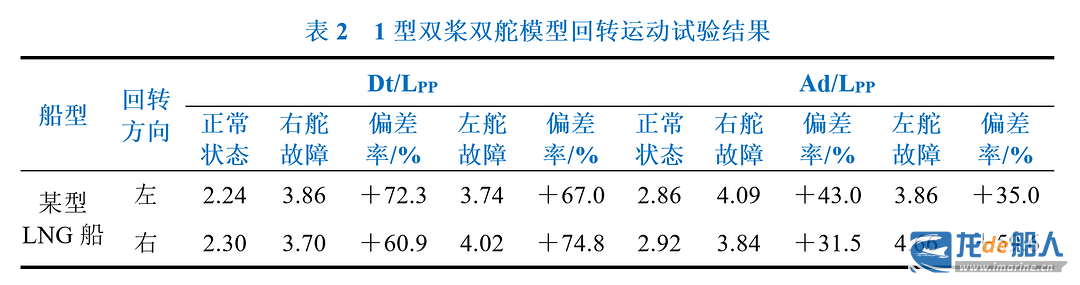
试验结果表明:对于3型单桨单舵模型的故障状态(即其中一个动力单元不运行,转舵角速度减半),进距最大增加了10.9%,战术直径最大增加了3.7%,标准修订稿提出的增加25%偏大;对于1型双桨双舵模型的故障状态(即其中一个舵角固定在0°),进距最大增加了59.6%,战术直径最大增加了74.8%,标准修订稿提出的增加25%明显偏小。
进一步分析1型双桨双舵模型回转试验结果可见,右回转时左舵失效状态的战术直径和进距较右舵失效状态分别增加8.6%和21.4%;左回转右舵失效状态的战术直径和进距较左舵失效状态分别增加3.2%和6.0%。
初步研究结果表明,与正常状态相比,单桨单舵船舶故障状态回转运动的变化较小,而双桨双舵船舶故障状态回转运动的变化很大,标准修订稿提出故障状态回转试验的进距和战术直径分别不大于5.6L和6.25L(即均较正常状态增加25%)是不合适的,需要针对不同船型的不同故障状态开展深入研究,分类提出合理的衡准。由于目前得到的数据有限,具体指标还需要进一步研究。另外,对于双桨双舵船舶,右回转左舵失效状态和左回转右舵失效状态为相对不利的状态,建议研究中重点关注。
五、取消故障状态和非传统推进/转向系统船舶的紧急停船试验
标准第5.3.4.2条提出故障状态(即多推进系统中的一个及其转向系统不运行)的船舶的停船距离不大于20L,较正常状态增加33.3%。
项目组采集了一艘双桨双舵LNG运输船的实船试航数据,分析结果显示,故障状态的停船距离较正常状态缩短了30%~45%。主要原因有两个方面:一是故障状态只有一桨驱动,初始航速为正常状态的65%;二是故障状态主机初始转速较低(约为正常状态的85%),由正转到停转再到稳定反转的时间较短(约为正常状态的55%)。
项目组进一步开展了某双桨双舵模型的结构吃水正常状态和故障状态的紧急停船对比试验,模拟了实船测试状态,正常状态初始航速对应于实船的16 kn,螺旋桨停止到反转时间间隔150 s。故障状态初始航速对应于实船的10.5 kn,为正常状态的65.6%;螺旋桨停止到反转时间间隔80 s,为正常状态的53.3%。模型对比试验结果如下:正常状态停船轨迹长度为4.6L;故障状态停船轨迹长度为3.1L,较正常状态减小32.6%。模型试验结果与实船测试结果一致。
基于实船测试和模型试验结果的分析,双桨双舵船舶在故障状态的停船距离远小于正常状态。因此,只需按照操纵性标准对正常状态船舶的紧急停船能力进行试验验证,无须对船舶的故障状态进行额外的紧急停船试验验证。对于非传统推进/转向系统船舶,无论是正常状态还是故障状态,其紧急停船能力均优于传统船舶,因此,也无须对船舶的故障状态进行额外的紧急停船试验验证。
综上所述,ISSM修订稿存在非传统推进/转向系统船舶试验方法不明确、航向保持试验缺乏必要性、故障状态回转运动和紧急急停衡准指标不合理等问题。建议IMO工作组结合实船数据、模型试验结果及行业专家意见,进一步明确试验方法、调整衡准指标,形成合理可行的国际标准,指导船舶设计、建造与运营,保障全球航运安全、效率与环保性能的协同提升。