韩国海洋大学(National Korea Maritime & Ocean University)的一个研究团队开发出一种可优化船舶自主导航系统的新型控制方法。该研究团队表示,现有的船舶控制系统使用的是海上自主水面舰艇(MASS)模型预测控制(Model Predictive Control,MPC)方法,没有考虑实际海况下作用在船舶上的各种力。
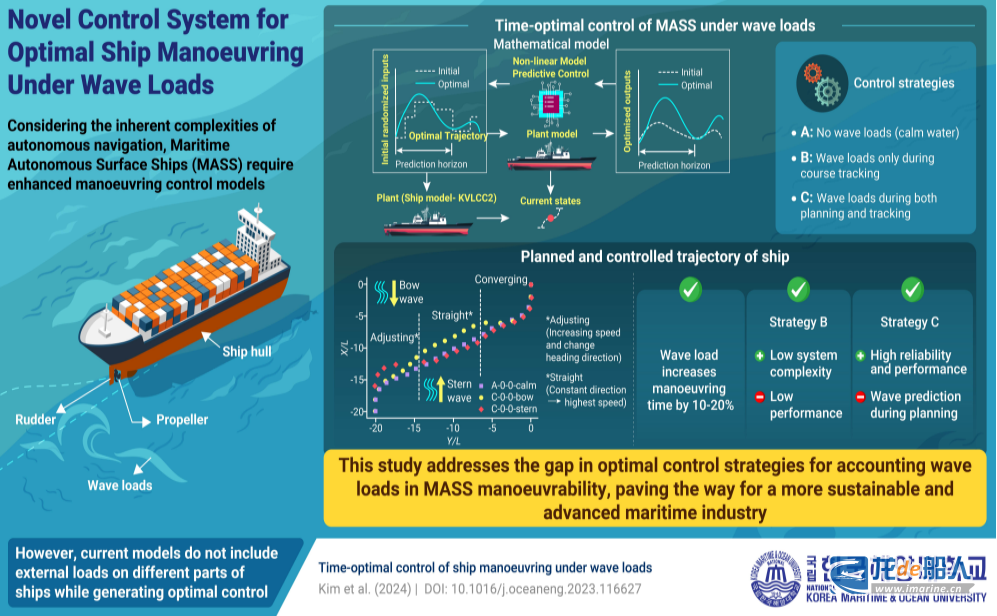
针对该问题,该研究团队在一项新研究中开发了一种新型时间优化控制方法,该方法考虑到了作用在船舶上的实际波浪载荷,从而能够有效地规划和控制海上MASS。
研究团队指出,设计一种时间效率高的船舶操纵控制系统是自主船舶控制领域最困难的挑战之一。虽然已有许多研究对这一问题展开调查,并提出了包括MPC在内的各种控制方法,但大多数研究都侧重于平静水域的控制,而平静水域并不代表真实的运营条件。海上航行期间,船舶不断受到不同外部负载的影响,其中海浪负载是影响操纵性能的最主要因素。
据介绍,该型控制系统的核心是一个综合船舶数学模型,该模型考虑了作用在船体、螺旋桨和方向舵等船舶关键部件上的海洋中的各种力,包括波浪载荷。然而,该模型不能直接用于优化操纵时间。为此,研究团队开发了一种新型时间优化模型,将数学模型从时间表述转化为空间表述。据称,此举成功地优化了操纵时间。
这些模型被集成到非线性MPC控制器中,以实现时间优化控制。研究团队通过模拟在不同波浪载荷下航行的真实船舶模型,旨在对控制器进行测试。
此外,为实现有效的航向规划和跟踪,研究团队提出了三种控制策略:策略A——在规划和跟踪阶段都不考虑波浪载荷,作为参考;策略B——仅在规划阶段考虑波浪载荷;策略C——在两个阶段都考虑波浪载荷,测量其对推进和转向的影响。
实验结果表明,波浪载荷增加了策略B和策略C的预期操纵时间。对比两种策略,研究人员发现策略B比策略C更简单,性能更低,而策略C更可靠。然而,由于策略C在规划阶段加入了波浪载荷预测,因此给控制器带来了额外负担。
该研究团队相关人员表示:“总体而言,此次研究填补了自主船舶操纵领域的一个关键空白,有助于发展技术更先进的海运业。该方法不及能够提高船舶自主运行的效率和安全性,并有可能降低航运成本和碳排放,从而惠及各个经济领域。”
长期以来,船舶海上操纵研究一直是航运业的核心。随着远程控制、通信技术和人工智能的快速发展,MASS概念已成为自主海上航行的一种前景广阔的解决方案。